
Peça de usinagem CNC de quatro eixos por atacado peças de hardware de precisão de liga de alumínio personalizadas Usinagem CNC CNC


ah








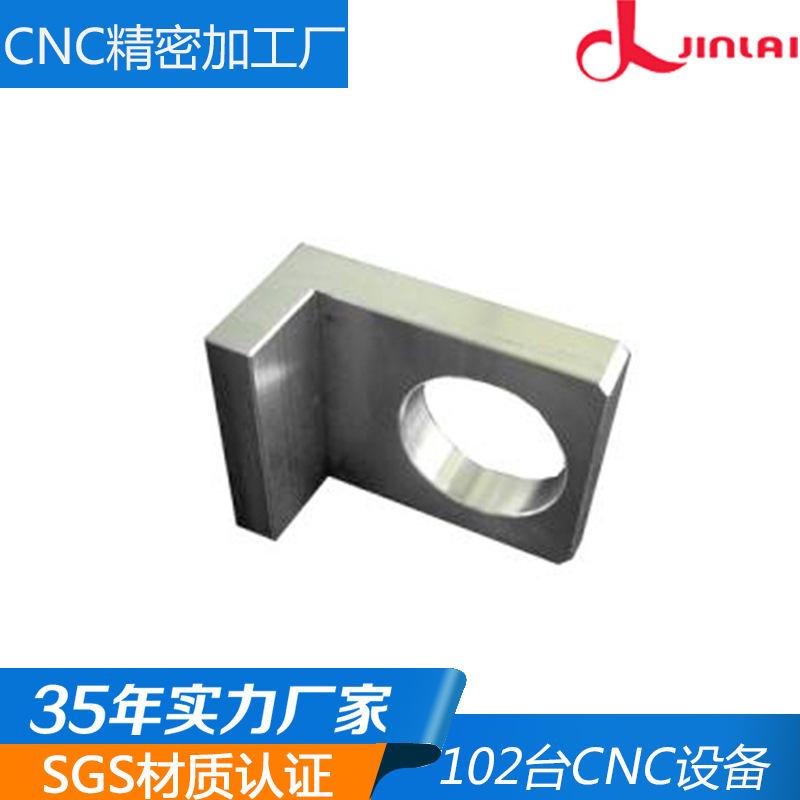


Peças de hardware de precisão de liga de alumínio para usinagem CNC de quatro eixos no atacado, usinagem CNC personalizada Quais são as diferentes maneiras de terceirizar o processamento de peças de hardware CNC?
Tecnologia de usinagem de prototipagem rápida: A tecnologia de prototipagem rápida para processamento de peças de hardware foi desenvolvida no século XX. Ela pode produzir rapidamente amostras ou peças com base em modelos CAD. É um método de processamento e fabricação de acumulação de material, ou seja, a formação tridimensional é concluída pela acumulação ordenada de materiais. A tecnologia de prototipagem rápida integra conquistas científicas e tecnológicas modernas, como tecnologia CNC, tecnologia de materiais, tecnologia a laser e tecnologia CAD, e é uma parte importante da moderna tecnologia de usinagem avançada. Processo de polimento eletrolítico alcalino de alumínio
1. Baixa precisão de usinagem das peças
A Dongguan Jiayuan Hardware Processing Company disse que geralmente é porque a dinâmica de alimentação entre os eixos não é ajustada corretamente de acordo com o erro durante a instalação e ajuste, ou por causa do desgaste, a corrente de transmissão dos eixos da máquina-ferramenta mudou (como folga do parafuso, alterações de erro de passo, movimento axial, etc.). Pode ser resolvido reajustando e modificando o valor de compensação de folga. Quando o erro de rastreamento dinâmico é muito grande e o alarme é acionado, você pode verificar: se a velocidade do servo motor está muito alta; se o elemento de detecção de posição está em boas condições; se o conector do cabo de feedback de posição está em bom contato; se a trava de saída analógica correspondente e o potenciômetro de ganho estão em boas condições; se o dispositivo de servo acionamento correspondente está normal.
2. O overshoot durante o movimento da máquina-ferramenta causa baixa precisão de usinagem
Os fabricantes de processamento CNC de Dongguan analisaram que o tempo de aceleração e desaceleração pode ser muito curto, e o tempo de mudança de velocidade pode ser adequadamente estendido; também pode ser que a conexão entre o servomotor e o parafuso de avanço esteja frouxa ou a rigidez seja muito baixa, e o ganho do loop de posição pode ser adequadamente reduzido.
1. Deformação axial do círculo
Essa deformação pode ser causada por ajuste mecânico inadequado, baixa precisão de posicionamento do eixo ou compensação inadequada da folga do parafuso, o que causará erros de circularidade ao passar pelos quadrantes.
2. Erro de elipse oblíqua (elipse na direção de 45 graus)
Neste momento, você deve primeiro verificar o valor do desvio de posição de cada eixo. Se o desvio for muito grande, você pode ajustar o ganho do loop de posição para eliminá-lo. Em seguida, verifique se a placa de interface do driver rotativo ou sincronizador de indução está ajustada corretamente e, em seguida, verifique se a folga do par de transmissão mecânica é muito grande e se a compensação de folga é apropriada.