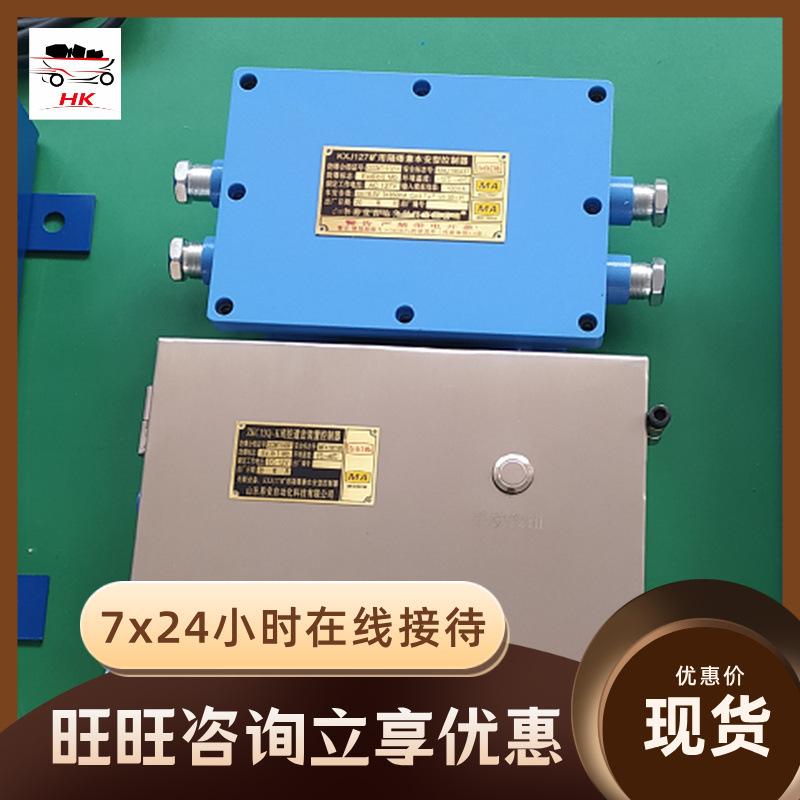

Introdução do produto do dispositivo de participação controlado pelo motorista:
O dispositivo de participação controlado pelo motorista foi projetado com tecnologias avançadas, como codificação digital e identificação por microcontrole. É composto principalmente de seis partes: controle remoto, receptor, sistema microcontrolador (ou seja, microcomputador de chip único), servomecanismo, sensor de posição e display. O microcontrolador é o núcleo de controle. O transmissor de codificação digital pode enviar 9 sinais de codificação diferentes, representando 9 desvios adjacentes que precisam ser controlados. O receptor digital recebe o sinal digital do transmissor e completa a identificação de diferentes desvios sob o controle do microcontrolador para garantir que o desvio não controlado não se mova. O sensor de posição completará a detecção de posição do desvio e o display exibirá informações como o código do desvio, o status atual da posição do desvio e a falha do dispositivo. O código de comparecimento é representado por um único número vermelho e cada número corresponde a um grupo de comparecimentos. O estado atual do desvio refere-se à posição aberta atual do desvio, ou seja, a via reta e o estado do desvio, que são representados pelas atraentes setas verdes "↑" e "→", respectivamente. As informações de falha são indicadas por uma tela preta.
Princípio de funcionamento do dispositivo de participação controlado pelo motorista:
Depois que o sistema for ligado, ele primeiro conclui o autoteste. Se o autoteste estiver anormal, a indicação de falha será exibida no display; se o autoteste estiver normal, o sistema está em estado de espera. Quando o carro-mina entra na faixa de recepção do receptor digital, o motorista pressiona o botão correspondente ao código da chave no controle remoto através do código de exibição (1, 2, 3, 4...9) no display. Neste momento, o receptor digital recebe o código digital do código da chave e o envia ao sistema microcontrolador para identificação digital; após a confirmação bem-sucedida, o sistema microcontrolador envia um comando ao acionador da chave para fazer o acionador da chave se mover, e o sensor no local detecta as informações de posição da chave. Se a chave não estiver no lugar, o controlador envia um comando e o acionador da chave retorna para a posição reversa. Neste momento, verifique se há detritos na chave. Após limpá-lo, opere o controle remoto novamente, o sistema poderá retomar a operação normal e o display mostrará a posição atual da chave. Este sistema pode ser equipado com um botão de operação manual no controlador para completar a operação do interruptor manual para evitar tratamento de emergência quando a tensão do controle remoto é insuficiente e não pode ser controlada remotamente normalmente, garantindo uma operação confiável do sistema.