Em estoque Suprimento Divisão Mina Controle Dispositivo de Desvio Modelo Completo ZKC127Q Dispositivo de Desvio de Controle de Divisão Pneumática


Composição do dispositivo de participação controlado pelo motorista:
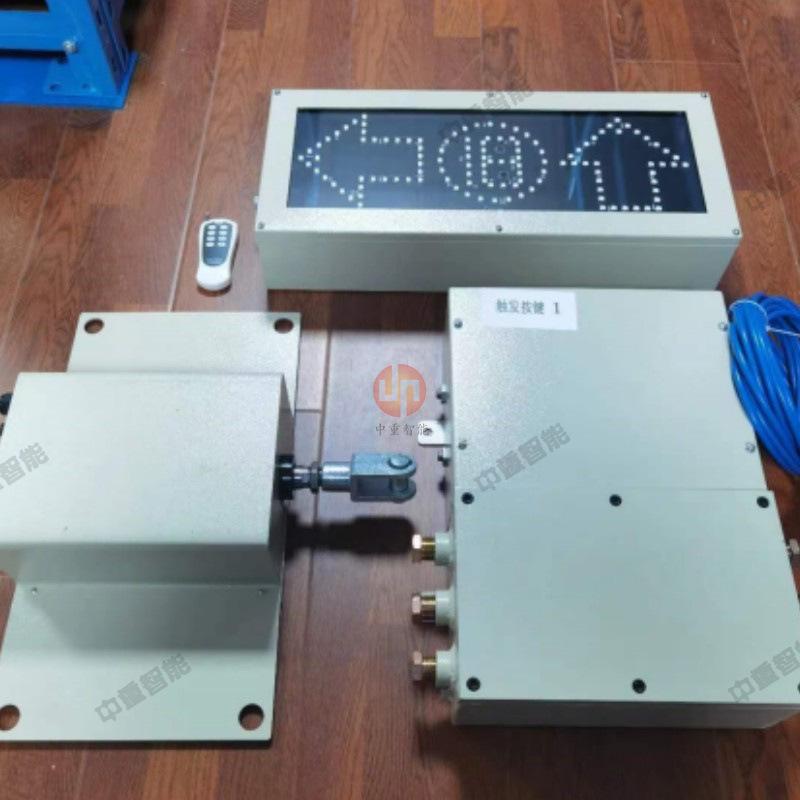
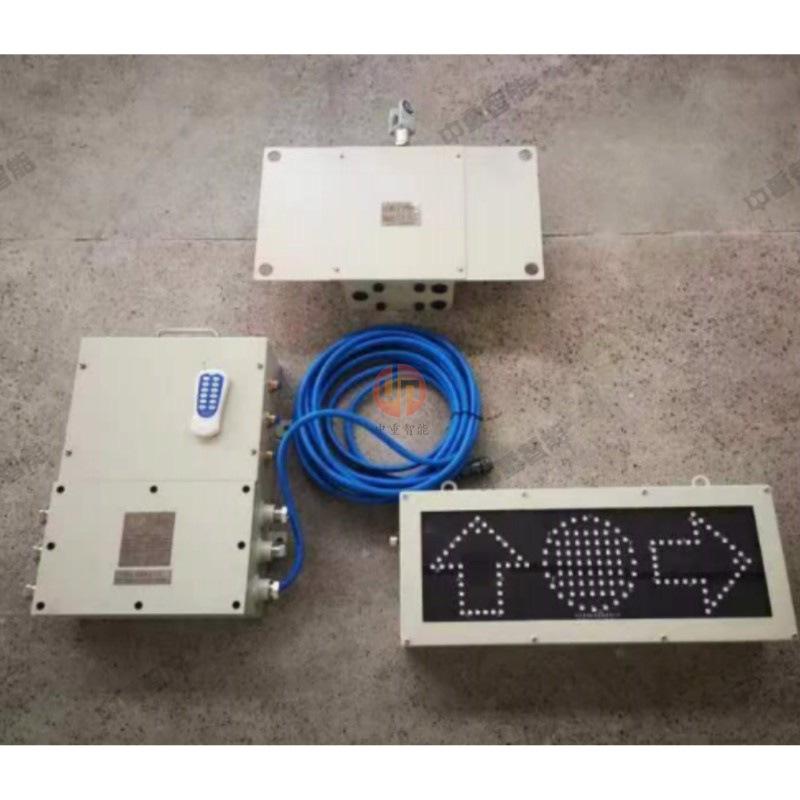
O dispositivo consiste em várias partes, incluindo controlador, interruptor elétrico, transmissor, display, etc.
Recursos do dispositivo de participação controlado pelo motorista
(1) O controlador usa um microcomputador de chip único com forte capacidade anti-interferência para aquisição de sinal, identificação e julgamento. O controle remoto sem fio pode controlar com precisão o desvio de uma longa distância para garantir o funcionamento da locomotiva;
(2) Adotando tecnologia de codificação digital, o sistema possui forte capacidade anti-interferência;
(3) O display indica intuitivamente a posição atual do desvio, e o maquinista pode alterar remotamente a posição de abertura do desvio de acordo com a direção alvo da locomotiva;
(4) A tela possui alto brilho, belas fontes e pode exibir a posição de participação com precisão e clareza;
Principais usos e escopo de aplicação
Este dispositivo é adequado para controle centralizado e controle individual de desvios em minas de carvão, minas não-carvão, poços de minas, pátios de minas e túneis de transporte.
Os principais parâmetros técnicos
(1) Temperatura ambiente: 0°C~+40°C;
(2) Umidade relativa: ≤96% (25℃);
(3) Instale em um local sem respingos de água, gotejamentos ou vibrações fortes;
(4) Em minas onde existe uma mistura explosiva de metano, mas nenhum ambiente de gás ou vapor que possa destruir o isolamento.
(5) Tensão de funcionamento: AC127V, 50Hz;
(6) Tipo à prova de explosão: Mineração à prova de explosão e tipo intrinsecamente seguro, marca à prova de explosão: Exd[ib]I.
princípio de trabalho
O dispositivo de forquilha de canal de controle de mina é projetado por tecnologia avançada, como compilação digital e reconhecimento de microcontrolador. É composto principalmente de seis partes do controle remoto, receptor, sistema de microcontrolador (ou seja, máquina de chip único), mecanismo servo, sensor no local e display. O microcontrolador é o núcleo de controle. O receptor de palavra recebe o sinal digital do transmissor e conclui a identificação de túnel diferente sob o controle do microcontrolador para garantir que o canal não controlado não seja ação.
O código de comparecimento é indicado por um único número vermelho e cada número corresponde a um grupo de comparecimentos. O estado atual do desvio refere-se à posição aberta atual do desvio, ou seja, a pista reta e o status do desvio, que são indicados pelas atraentes setas verdes "↑" e "→", respectivamente. As informações de falha são indicadas por uma tela preta.
O princípio de funcionamento é o seguinte: após o sistema ser ligado, ele primeiro conclui o autoteste. Se o autoteste for anormal, a indicação de falha será exibida no visor; se o autoteste for normal, o sistema estará em um estado de espera. Quando o vagão de mina entra no alcance de recepção do receptor digital, o motorista pressiona o botão correspondente ao código do interruptor no controle remoto por meio do código do visor (1, 2, 3, 4...9) no visor. Neste momento, o receptor digital recebe o código digital do código do interruptor e o envia ao sistema do microcontrolador para identificação digital; após a confirmação bem-sucedida, o sistema do microcontrolador envia um comando ao driver do interruptor para fazer o driver do interruptor se mover, e o sensor no local detecta as informações da posição do interruptor. Se o interruptor não estiver no lugar, o controlador envia um comando e o driver do interruptor retorna à posição reversa. Neste momento, verifique se há detritos no interruptor. Após limpá-lo, opere o controle remoto novamente, o sistema pode retomar a operação normal e o visor mostrará a posição atual do interruptor. No controlador deste sistema, o dispositivo pode ser equipado com um botão de operação manual para concluir a operação do interruptor manual para evitar o tratamento de emergência quando a voltagem do controle remoto for insuficiente e o controle remoto não puder ser controlado remotamente normalmente, de modo a garantir a operação do sistema.