



Motor de passo bifásico
57BYGH311-01
Fase: 2 fases
Corrente: 3A
Resistência: 1,2 ohms
Indutância: 2,2 mH
Torque estático máximo: 15
(Kg.cm)
Peso: 1,1 KG
Corpo: 76mm
Eixo de saída: 25,5 mm
Diâmetro do eixo: 8 mm
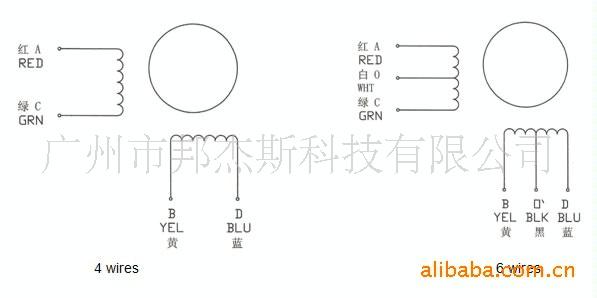
Fiação: Vermelho A Verde C Amarelo B Azul D

Venda de motores de passo e drivers especiais para máquinas de gravação, preços preferenciais para grandes quantidades!
Motores de passo bifásicos são amplamente utilizados em:Máquina de marcação pneumática computadorizada, máquina de gravação a laser, máquina de letras, máquina de gravação mecânica, máquina de bordado computadorizada, impressora jato de tinta, máquina de corte de arame, máquina fotográfica, máquina de encadernação, máquina de embalagem, máquina de impressão, máquina de transplante de cabelo, máquina têxtil, máquina ATM, instrumento de medição de coordenadas, equipamento médico, maquinário cerâmico, equipamento de pulverização, robô, máquina-ferramenta CNCespere!
Resposta técnica:
1. O que é um motor de passo?
Um motor de passo é um atuador que converte pulsos elétricos em deslocamento angular. Em termos simples: quando o driver do passo recebe um sinal de pulso, ele aciona o motor de passo para girar um ângulo fixo (e ângulo de passo) na direção definida. Você pode controlar o deslocamento angular controlando o número de pulsos para obter um posicionamento preciso; ao mesmo tempo, você pode controlar a velocidade e a aceleração do motor controlando a frequência de pulso para obter a regulação da velocidade.
2. Quais são os tipos de motores de passo?
Existem três tipos de motores de passo: ímã permanente (PM), reativo (VR) e híbrido (HB). Os motores de passo de ímã permanente são geralmente bifásicos, com pequeno torque e volume, e um ângulo de passo de 7,5 graus ou 15 graus; Os motores de passo reativos são geralmente trifásicos, o que pode atingir grande saída de torque e um ângulo de passo de 1,5 graus, mas o ruído e a vibração são muito grandes. Eles foram eliminados em países desenvolvidos como Europa e Estados Unidos na década de 1980; Os motores de passo híbridos referem-se a uma combinação das vantagens dos motores de passo de ímã permanente e reativos. É dividido em duas fases e cinco fases: o ângulo de passo de duas fases é geralmente de 1,8 graus e o ângulo de passo de cinco fases é geralmente de 0,72 graus. Este tipo de motor de passo é o mais amplamente utilizado.
3. O que é torque de retenção?
O torque de retenção se refere ao torque do estator travando o rotor quando o motor de passo é energizado, mas não está girando. É um dos parâmetros mais importantes do motor de passo. Normalmente, o torque do motor de passo em baixa velocidade é próximo ao torque de retenção. Como o torque de saída do motor de passo decai com o aumento da velocidade, e a potência de saída também muda com o aumento da velocidade, o torque de retenção se tornou um dos parâmetros mais importantes para medir motores de passo. Por exemplo, quando as pessoas dizem um motor de passo de 2N.m, isso significa um motor de passo com um torque de retenção de 2N.m sem instruções especiais.
4. O que é TORQUE DE DETENÇÃO? TORQUE DE DETENÇÃO se refere ao torque quando o estator trava o rotor quando o motor de passo não está energizado.
Não há um método de tradução unificado para DETENT TORQUE na China, o que pode facilmente levar a mal-entendidos. Como o rotor do motor de passo reativo não é feito de material de ímã permanente, ele não tem DETENT TORQUE.
5. Qual é a precisão de um motor de passo?
É cumulativo? Geralmente, a precisão dos motores de passo é de 3-5% do ângulo de passo e não é cumulativa.
6. Qual é a temperatura de superfície permitida do motor de passo?
Se a temperatura de um motor de passo for muito alta, o material magnético do motor será desmagnetizado, o que causará uma diminuição no torque ou até mesmo uma perda de passos. Portanto, a temperatura máxima permitida na superfície do motor deve depender do ponto de desmagnetização do material magnético dos diferentes motores. Em termos gerais, o ponto de desmagnetização de materiais magnéticos é acima de 130 graus Celsius, e alguns chegam a 200 graus Celsius. Portanto, é completamente normal que a temperatura da superfície do motor de passo esteja entre 80 e 90 graus Celsius.
7. Por que o torque de um motor de passo diminui à medida que a velocidade aumenta?
Quando o motor de passo gira, a indutância de cada enrolamento de fase do motor formará uma força eletromotriz reversa. Quanto maior a frequência, maior a força eletromotriz reversa. Sob sua ação, a corrente de fase do motor diminui conforme a frequência (ou velocidade) aumenta, resultando em uma diminuição no torque.
8. Por que o motor de passo funciona normalmente em baixa velocidade, mas não consegue dar partida e faz um barulho agudo se estiver acima de uma determinada velocidade?
Os motores de passo têm um parâmetro técnico: frequência de partida sem carga, que é a frequência de pulso na qual o motor de passo pode iniciar normalmente em condições sem carga. Se a frequência de pulso for maior que esse valor, o motor não pode iniciar normalmente e pode perder etapas ou parar. Em condições de carga, a frequência de partida deve ser menor. Se o motor deve girar em alta velocidade, a frequência de pulso deve ter um processo de aceleração, ou seja, a frequência de partida é baixa e, em seguida, é aumentada para a alta frequência desejada em uma determinada aceleração (a velocidade do motor aumenta de baixa velocidade para alta velocidade).
9. Como superar a vibração e o ruído do motor de passo híbrido bifásico quando operando em baixa velocidade?
As desvantagens inerentes dos motores de passo são que eles produzem grandes vibrações e ruídos ao girar em baixas velocidades. Geralmente, as seguintes soluções podem ser usadas para superá-las:
A. Se o motor de passo funcionar na zona de ressonância, a zona de ressonância pode ser evitada alterando a transmissão mecânica, como a taxa de redução;
B. Utilize um driver com função de subdivisão, que é o método mais comum e simples;
C. Substitua por um motor de passo com um ângulo de passo menor, como um motor de passo trifásico ou pentafásico;
D. Mudar para um servo motor CA pode superar quase completamente a vibração e o ruído, mas o custo é mais alto;
E. Adicione um amortecedor magnético ao eixo do motor. Este produto já está disponível no mercado, mas a estrutura mecânica mudará significativamente.
10. O número de subdivisões de um driver de subdivisão pode representar precisão?
A tecnologia de subdivisão do motor de passo é essencialmente uma tecnologia de amortecimento eletrônico (consulte a literatura relevante). Seu objetivo principal é reduzir ou eliminar a vibração de baixa frequência do motor de passo. Melhorar a precisão da operação do motor é apenas uma função suplementar da tecnologia de subdivisão. Por exemplo, para um motor de passo híbrido bifásico com um ângulo de passo de 1,8°, se o número de subdivisão do driver de subdivisão for definido como 4, a resolução da operação do motor será de 0,45° por pulso. Se a precisão do motor pode atingir ou se aproximar de 0,45° também depende de outros fatores, como a precisão do controle de corrente de subdivisão do driver de subdivisão. A precisão dos drivers de subdivisão de diferentes fabricantes pode variar muito; quanto maior o número de subdivisão, mais difícil é controlar a precisão.
11. Qual é a diferença entre a conexão em série e a conexão em paralelo entre o motor de passo híbrido de quatro fases e o driver?
Motores de passo híbridos de quatro fases são geralmente acionados por drivers de duas fases. Portanto, ao conectar, o motor de quatro fases pode ser conectado em série ou em paralelo para formar duas fases. O método de conexão em série é geralmente usado em situações em que a velocidade do motor é relativamente alta. Neste momento, a corrente de saída do driver necessária é 0,7 vezes a corrente de fase do motor, então o motor esquenta menos; o método de conexão paralela é geralmente usado em situações em que a velocidade do motor é relativamente alta (também conhecida como conexão de alta velocidade), e a corrente de saída do driver necessária é 1,4 vezes a corrente de fase do motor, então o motor esquenta mais.
12. Como determinar a fonte de alimentação CC para o driver do motor de passo?
A. Determinação da tensão A tensão de alimentação do driver do motor de passo híbrido está geralmente em uma ampla faixa (por exemplo, a tensão de alimentação do IM483 é de 12~48VDC). A tensão de alimentação é geralmente selecionada de acordo com a velocidade operacional do motor e os requisitos de resposta. Se a velocidade operacional do motor for alta ou o requisito de resposta for rápido, o valor da tensão também será alto, mas preste atenção à ondulação da tensão de alimentação não pode exceder a tensão máxima de entrada do driver, caso contrário, pode danificar o driver.
B. Determinação da corrente A corrente da fonte de alimentação é geralmente determinada com base na corrente de fase de saída I do driver. Se uma fonte de alimentação linear for usada, a corrente da fonte de alimentação pode ser geralmente de 1,1 a 1,3 vezes de I; se uma fonte de alimentação comutada for usada, a corrente da fonte de alimentação pode ser geralmente de 1,5 a 2,0 vezes de I.
13. Em que circunstâncias o sinal offline FREE do driver do motor de passo híbrido é geralmente usado?
Quando o sinal offline FREE é baixo, a saída de corrente do driver para o motor é cortada, e o rotor do motor fica em um estado livre (estado offline). Em alguns equipamentos de automação, se o eixo do motor precisar ser girado diretamente sem desligar o driver (modo manual), o sinal FREE pode ser definido como baixo para deixar o motor offline para operação ou ajuste manual. Após a operação manual ser concluída, o sinal FREE pode ser definido como alto para continuar o controle automático.
14. Como usar um método simples para ajustar a direção de rotação de um motor de passo bifásico depois que ele é ligado?
Basta trocar o A+ e o A- (ou B+ e B-) da fiação do motor e do driver.









