Nome do produto: Controlador de acionamento de motor de passo simples
Este controlador tem as mesmas funções originais de antes, mas tem uma função adicional de gerar sinais PWM. Há um pino de jumper na placa que pode ser definido e selecionado. A configuração padrão é gerar um sinal de frequência de pulso.
REQ é o sinal de frequência de pulso
PWM é gerar sinal PWM
Comprimento*largura*altura: Aproximadamente 73*51*37MM
Descrição do produto:
1.Este módulo é um módulo gerador de pulsos, que fornece um sinal ao driver de passo. Se você quiser controlar um motor de passo, você também deve equipá-lo com um driver.
Este controlador simples + driver de passo + motor de passo + fonte de alimentação CC podem formar uma plataforma de controle simples.
O controlador agora tem pontos comuns altos, médios e baixos3Os sinais de frequência podem ser selecionados por pinos de jumper, e os parâmetros de frequência são aproximadamente:
Alto: 5,8 KHZ-127 KHZ
Médio: 590HZ-15.8KHZ
Baixo: 82HZ-2,3KHZ,
Medição de frequência: É possível medir portas PUL e de cátodo comum (GND).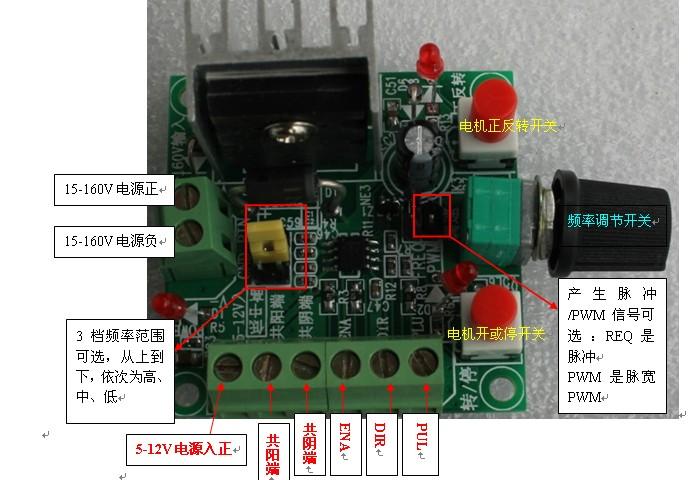
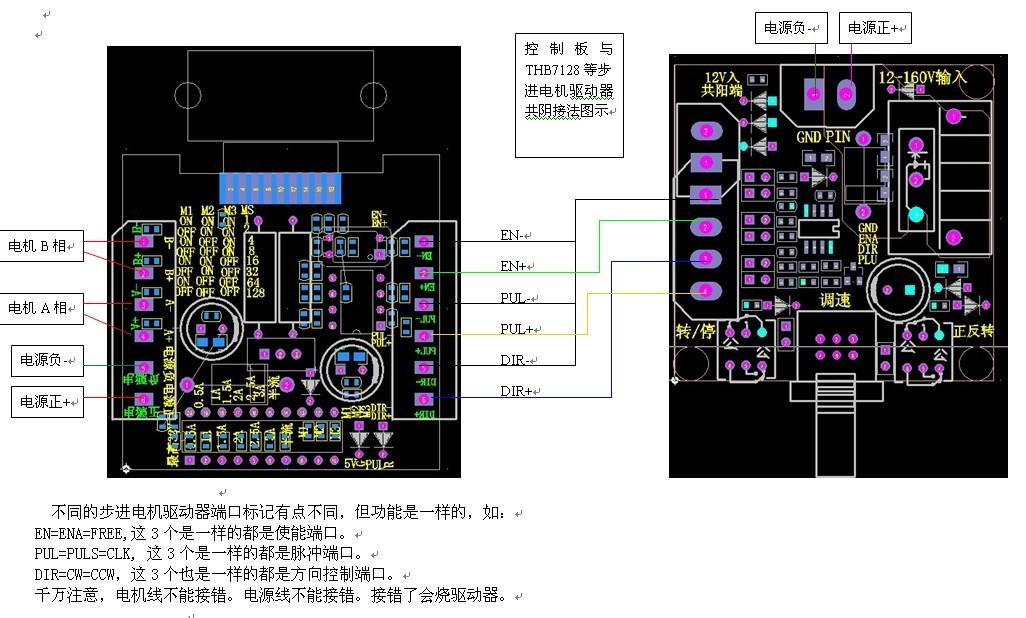
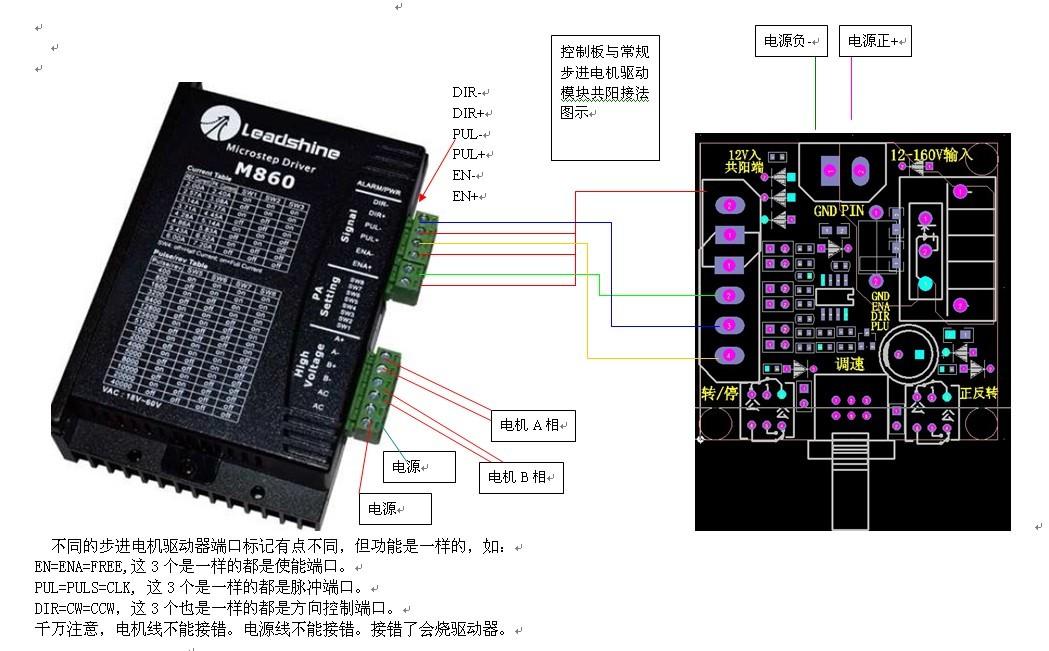
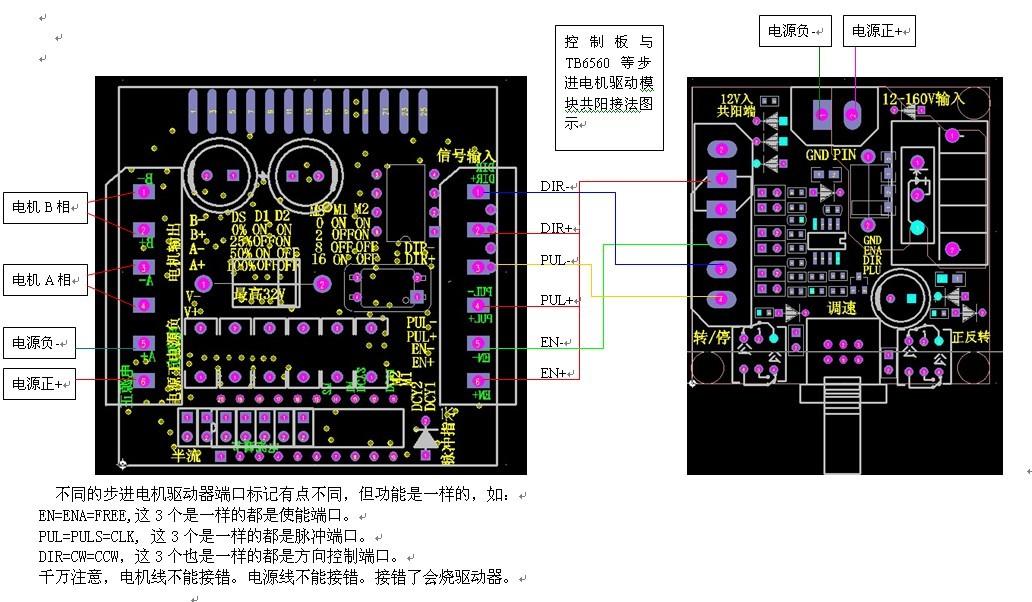
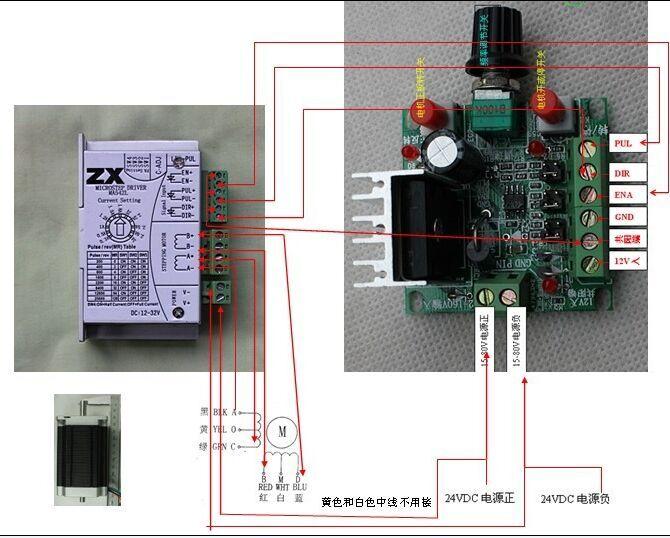
2, PUL+ e PUL- são o positivo e o negativo do pulso; EN+ e EN- são o positivo e o negativo do terminal de habilitação; DIR+ e DIR- são o positivo e o negativo da direção. Conecte esses 6 fios às 6 portas do driver correspondentes ao pulso, direção e habilitação. Observe que se você quiser usar a função de partida ou parada, o terminal de habilitação ENA no controlador deve ser conectado ao driver com um cátodo comum ou ânodo comum.
3、2Entrada de energia em grupo, 2 grupos só precisam ser conectados a um grupo de fonte de alimentação.
Um conjunto é uma fonte de alimentação conectada a uma CC de 15-160 VCC, e a tensão de trabalho recomendada é de 15-48 VCC.
O outro grupo é 5-12VDC. Quando usado com o driver, é recomendado usar 12V, não 5V de fonte de alimentação. Quando 5V não é muito, a fonte de alimentação positiva é conectada à "entrada 5-12V" e a fonte de alimentação negativa é conectada ao "cátodo comum".
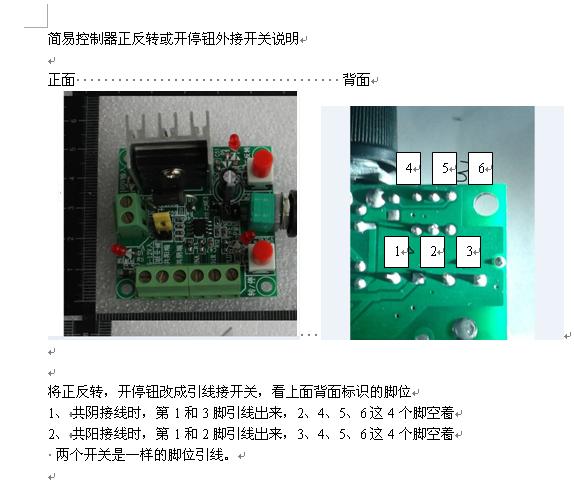
4A rotação para frente e para trás, bem como a partida e parada do motor, podem ser controladas pressionando botões.
5, a velocidade do motor pode ser controlada alterando a frequência ajustando o potenciômetro.
61. Os interruptores para avanço, ré, liga/desliga do motor são interruptores autotravantes comuns.
A seguir está um exemplo de fiação com a placa de driver